The spherical space $S^3$
What is the 3-sphere?
The space $S^3$ is the 3-dimensional analogue of the usual sphere in 2 dimensions. It is an isotropic space (all the directions play the same role). Among the eight Thurston geometries, it is the only compact one. It can be seen as the unit tangent bundle of the 2-sphere. This point of view is also known as the Hopf fibration.
Click on the button below to reveal a concrete model of the 3-sphere.
Some views of 3-sphere
Warning: Some of the real-time simulations below requires a powerful graphic card. If your computer is not fast enough, you can reduce the size of your browser window. Click on the button below to reveal the fly commands.
The default controls to fly in the scene are the following. If you have a different keyboard, the keys should be the ones having the same location as the given ones on a QWERTY keyboard.
| Command | QWERTY keyboard | AZERTY keyboard |
|---|---|---|
| Yaw left | a | q |
| Yaw right | d | d |
| Pitch up | w | z |
| Pitch down | s | s |
| Roll left | q | a |
| Roll right | e | e |
| Move forward | arrow up | arrow up |
| Move backward | arrow down | arrow down |
| Move to the left | arrow left | arrow left |
| Move the the right | arrow right | arrow right |
| Move upwards | ' | ù |
| Move downwards | / | = |
HD pictures of the 3-sphere can be found in the gallery
Features of 3-sphere
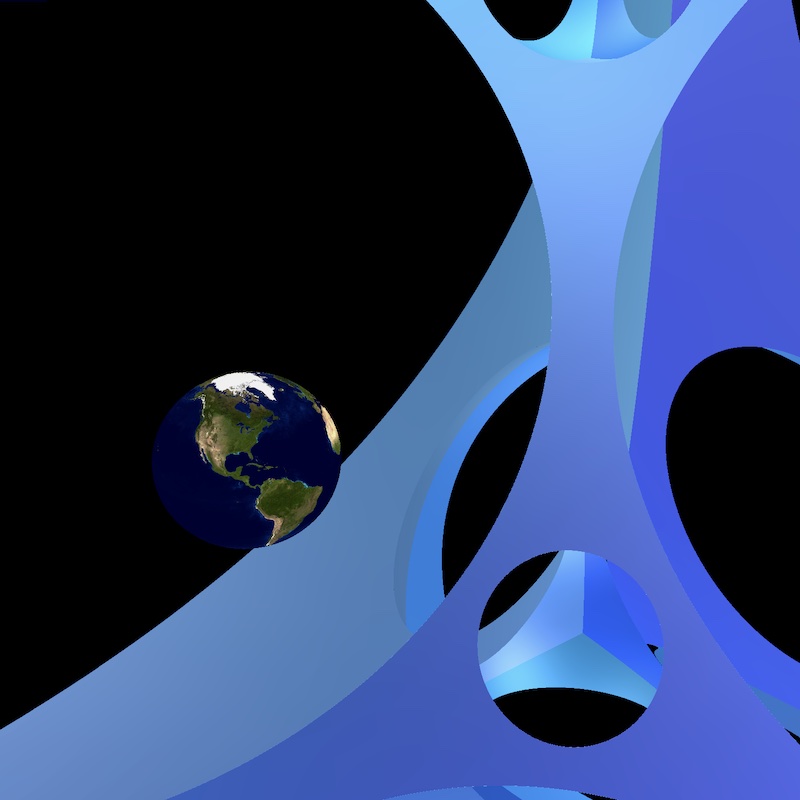
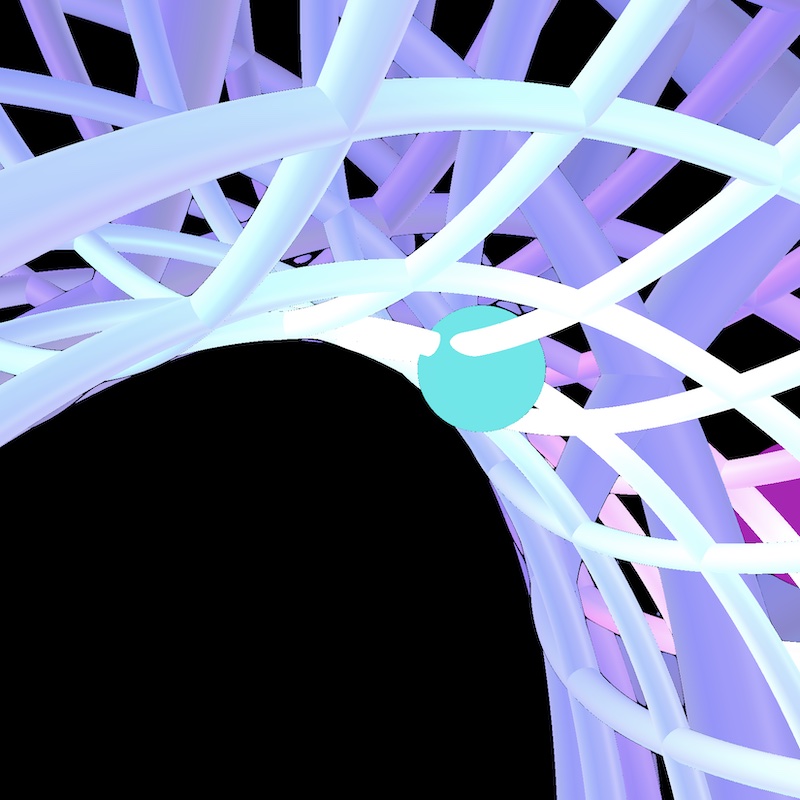
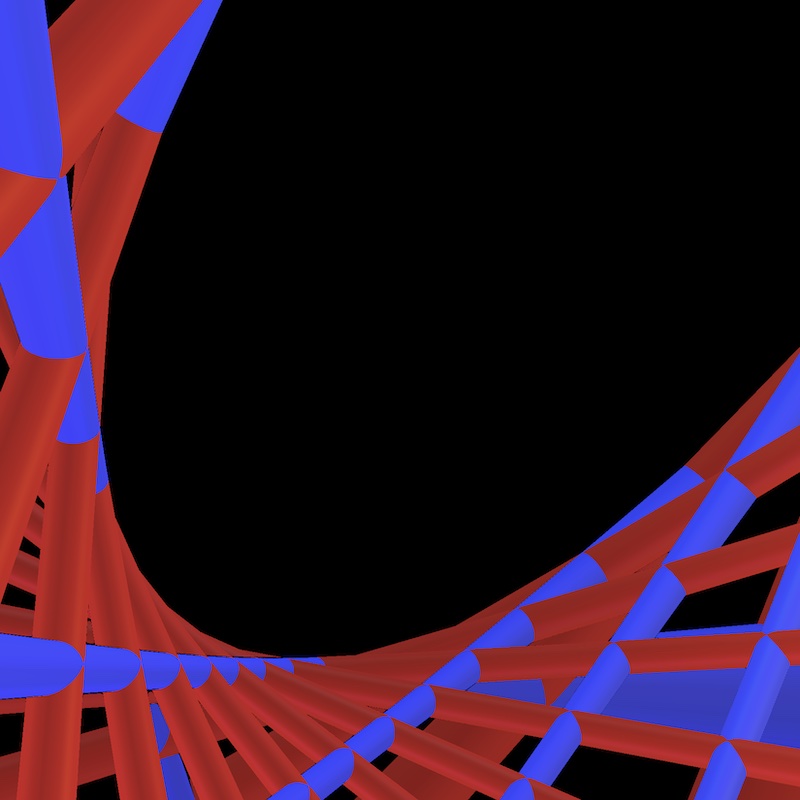
Geodesic Convergence
Positive curvature makes geodesics which are initially diverging come back together again, and meet at the antipode to their point of origin.
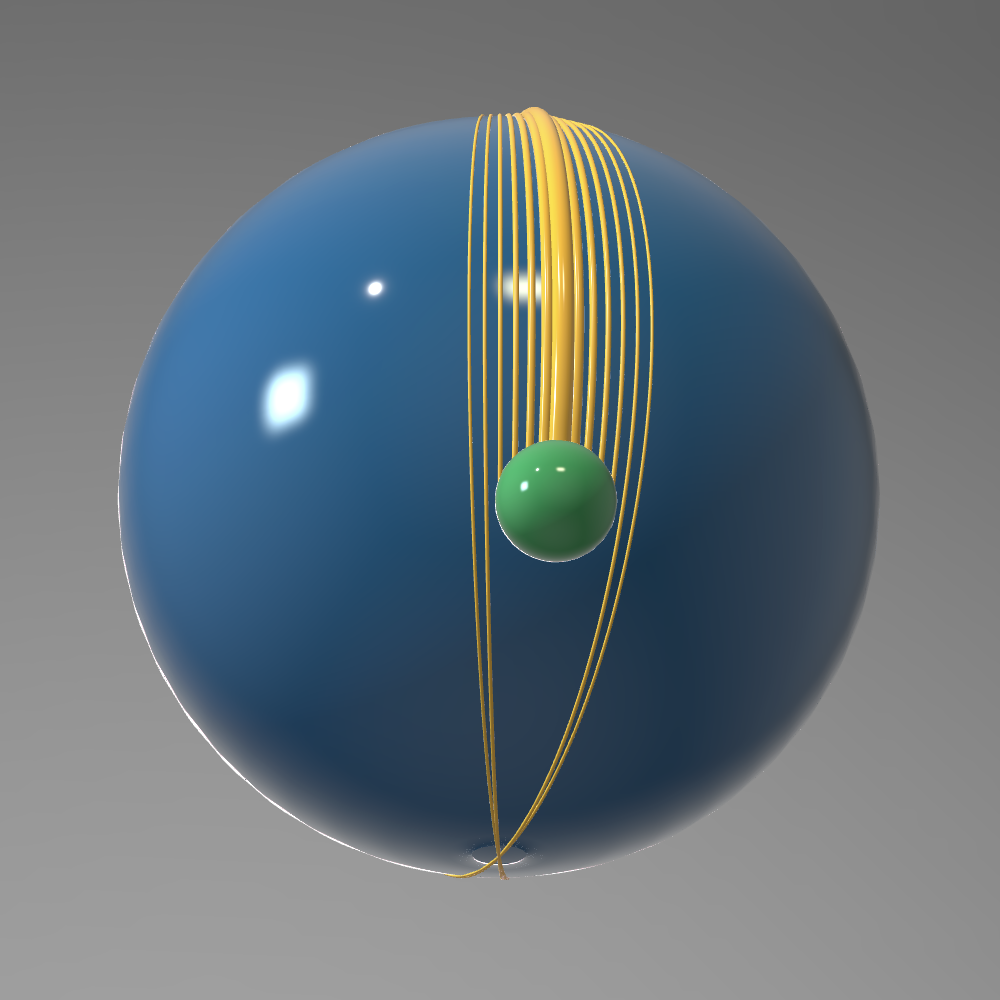
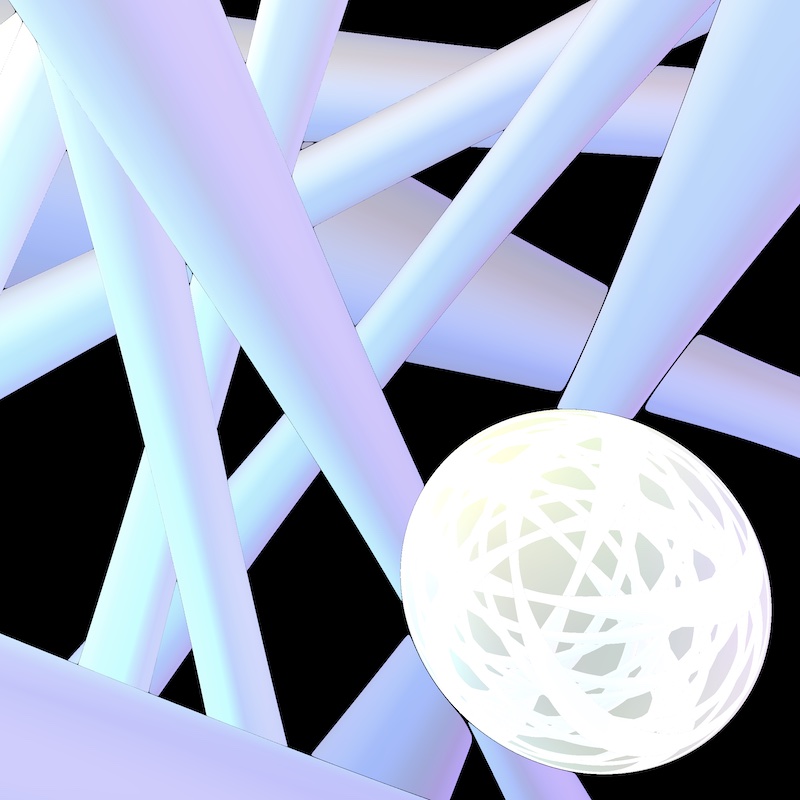
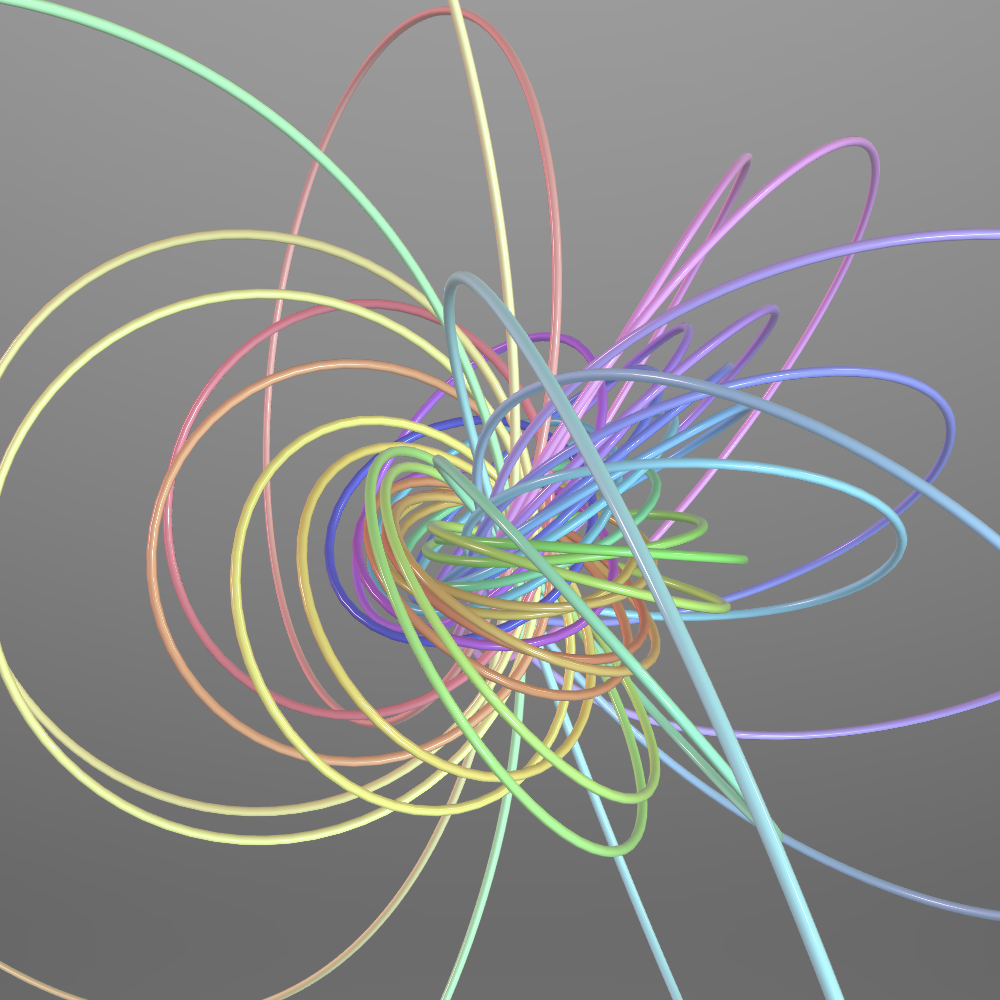
The Hopf Fibration
The Hopf fibration is a decomposition of the 3-sphere as a circle bundle over the two-sphere. The simulation below represents some fibers of the Hopf fibration. They corresponds to the vertices of a regular dodecahedron in $S^2$. A reflecting sphere has been adding to the scene to capture a more global view of these fibers.
There are several possible descriptions of this fibration. One of them goes through quaternions.
The quaternions are the elements of a 4-dimensional skew field generated by $1$, $\boldsymbol i$, $\boldsymbol j$ and $\boldsymbol k$, subject to the following relations: $$ \boldsymbol i^2 = \boldsymbol j^2 = \boldsymbol k^2 = \boldsymbol i\boldsymbol j\boldsymbol k = -1 $$ The 3-sphere corresponds to the set of unit quaternions (i.e. the quaternions with norm one). Consider a unit vector $u = (u_x, u_y, u_z)$ in $\mathbb R^3$ and an angle $\theta \in \mathbb R$. Let
- $R \in {\rm SO}(3)$ be the rotation of angle $\theta$ around the axis directed by $u$, and
- $q$ be the unit quaternion given by $$ q= \cos(\theta/2) + \sin(\theta/2) \left[ u_x \boldsymbol i + u_y \boldsymbol j + u_z \boldsymbol k\right]$$
To a vector $v = (v_x, v_y, v_z)$ we associate a quaternion $p_v = v_x \boldsymbol i + v_y \boldsymbol j + v_z \boldsymbol k$. It turns out that $qp_vq^{-1}$ represents the image of $v$ by $R$, that is $qp_vq^{-1} = p_{v’}$, where $v’ = Rv$.
Conversely, every unit quaternion $q$ represents a rotation $R$ in $\mathbb R^3$. This relation defines a surjective map $\pi \colon S^3 \to {\rm SO}(3)$. The pre-image of any rotation $R$ consists of two points of the form $q$ and $-q$.
Now ${\rm SO}(3)$ acts by isometries on $S^2$. Denote by $n = (0,0,1)$ the north pole of $S^2$. The Hopf fibration is the map $p\colon S^3 \to S^2$ given by $q \mapsto \pi(q)n$. A point $v$ on $S^2$ is fixed by a one-parameter subgroup of ${\rm SO}(3)$, namely the rotations around $\mathbb Rv$. It turns out that the pre-image under $\pi \colon S^3 \to {\rm SO}(3)$ of this subgroup is homeomorphic to a circle. Said differently the fibers of the Hopf fibration are circles. These circles are closed geodesic in $\mathbb R^3$.